Z-01_東京大学 駒場リサーチキャンパス公開 2021 (オンライン開催) 公式ページ
Z-02_東京大学 モビリティ・イノベーション連携研究機構 (UTmobI) 関連ページ
Z-03_自動運転の車両運動制御 寄付研究部門 関連ページ
Z-04_次世代モビリティ研究センター 関連ページ
Z-05_須田研究室 駒場リサーチキャンパス公開(2021/Online)公式イベント情報 全体詳細 及び 参加登録
Z-06_須田研究室 駒場リサーチキャンパス公開(2021/Online)公式イベント情報 6月11日(金)13:00〜14:00イベント_研究室紹介
Z-07_須田研究室 駒場リサーチキャンパス公開(2021/Online)公式イベント情報 6月11日(金)14:00〜16:30(仮)_ポスター・セッション1
Z-08_須田研究室 駒場リサーチキャンパス公開(2021/Online)公式イベント情報 6月12日(土)12:00〜16:30(仮)_ポスター・セッション2
Z-08_須田研究室 駒場リサーチキャンパス公開(2021/Online)公式イベント情報 6月12日(土)13:00〜14:30イベント_モビリティ・イノベーション座談会
A.全体
A-01_須田研究室 車両の運動と制御 1
A-02_須田研究室_研究体制 1
A-03_次世代モビリティ研究センター1
A-04_東京大学モビリティ・イノベーション連携研究機構1
A-05_自動運転の車両運動制御 寄付研究部門1
B.概要
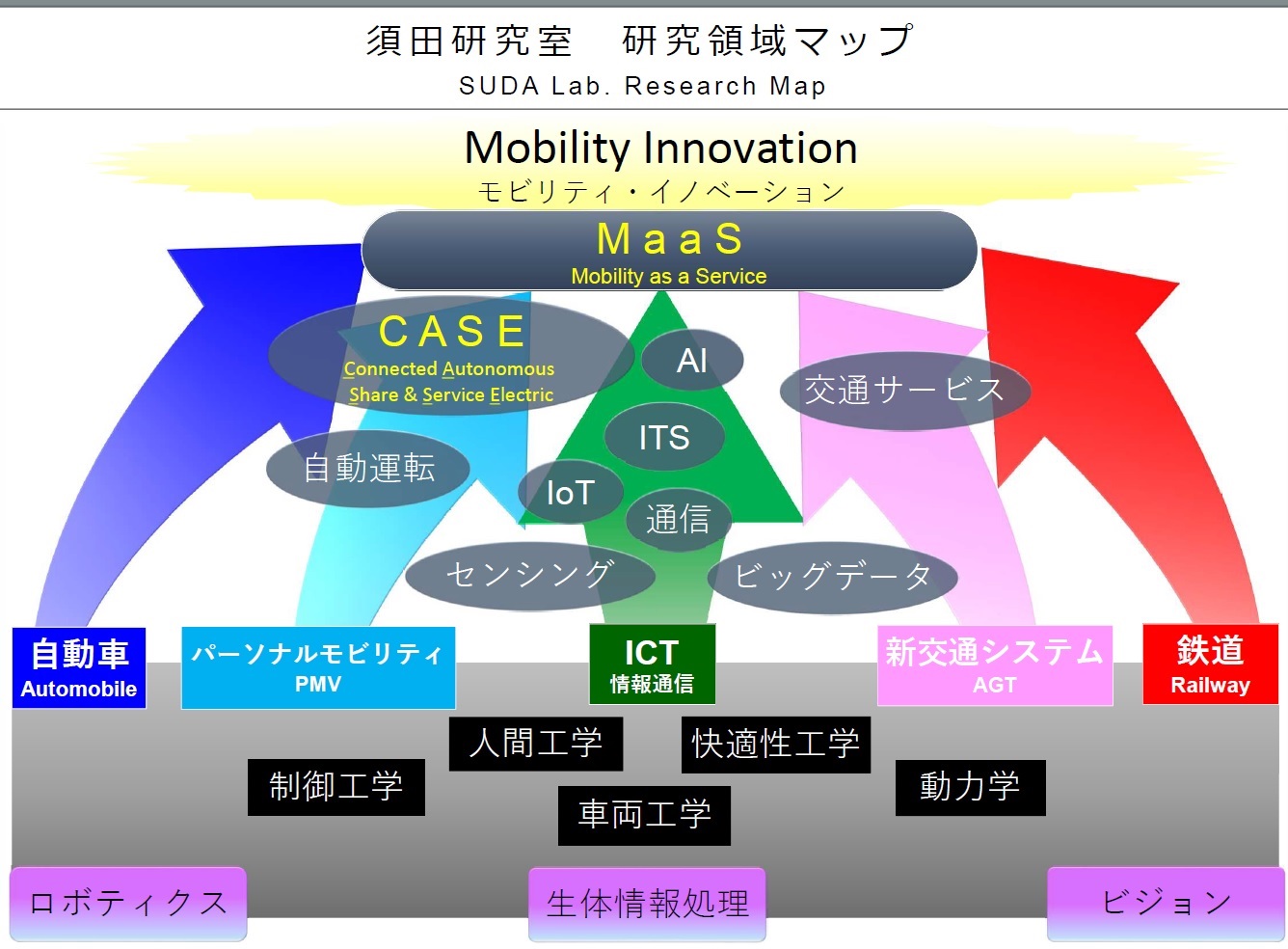
B-01_モビリティ・イノベーションプロジェクト
B-02_社会受容性・快適性に関する研究
B-03_車両・インフラ・人間系の動特性と状態検出
B-07_ITS R&R実験フィールド
C.快適性
C-01_座席配置シミュレータと実験による快適通勤車両の提案
C-02_視覚と振動の関係に着目した 鉄道車両の乗り心地官能評価実験
C-03_人間行動生態心理学に基づく自動車車内の快適性評価に関する研究
C-04_駐車場ITSに関する研究 人間行動モデリングに基づく駐車場の工学的検討
C-05_鉄道車両内における乗客の周辺視野からの視覚的情報受容に関する研究
C-06_自動運転時代における自動車シートのあり方に関する研究1
D.自動車
D-01_ドライビングシミュレータ
D-02_研究用ユニバーサルドライビングシュミレータ
D-03_ドライビングシミュレータ 研究事例
D-04_モーション・シミュレータを用いた研究
D-05_ドライビンシミュレータの実車実験再現性の向上
D-06_キャンバ制御に関する研究
D-07_ドライバの運転特徴抽出に関する研究
D-08_タイヤの動特性に関する研究
D-09_タイヤ・路面状態計測と推定
D-10_路面・タイヤ走行模擬試験装置
D-11_ドライバ脳活動計測による運転技量の評価
D-12_先進的運転支援システムに関する研究
D-13_意のままの走りを実現する車両運動特性に関する研究
D-14_情報板を対象としたDSの臨場感向上のメカニズムに関する研究
D-15_自動運転の社会受容性評価
D-16_EVの走行データ解析
D-17_自動運転車両乗り心地向上に資するAPC1
G.PMV/パーソナル・モビリティ・ビークル
G-01_超小型モビリティ車両の運動性能向上
G-02_非同一軸上の車輪を有するパーソナルモビリティビークル Stavic-A の運動制御に関する研究
G-03_次世代スマートモビリティ(Stavic-4H)
G-04_PMVの研究展開動向
G-05_車体幅に着目したリーンステア・ビークルの受容性に関する研究
G-06_倒立振子型パーソナルトランスポーターにおける力覚提示を用いた制動支援に関する研究
G-07_リーンステアビークルのユーザビリティに関する研究1
G-08_超小型モビリティで超高齢社会を暮らしやすく1
H.モビリティー・イノベーション&ITS
H-01_東北復興次世代エネルギー研究開発プロジェクト
H-02_広島での車車間・路車間通信型ITSの検討
H-03_公共交通機関の情報連携サービスに関する研究
H-04_エネルギーITS
H-05_自動運転に関する展開
H-06_自動運転を取り巻く状況
H-07_ETC2.0プローブデータの利活用に関する研究
H-08_交差点付近に設置した定点カメラの画像情報を用いた自動運転システムに関する研究
H-09_深層学習を用いた車載カメラからの手信号の認識
H-10_トラックの隊列走行システムに関する動向
H-11_高速バスの自動運転・隊列走行の社会実装に向けた考察
H-12_MaaSに関連する動向と研究活動
H-13_試験用交通信号機
H-14_自動運転バス実証実験1
H-15_定点カメラを用いたインフラ協調型自動運転システムの検討
H-16_車載カメラを用いたカーブミラーに映る危険事象の認識
K.鉄道
K-01_鉄道車両の曲線通過イノベーション
K-02_傾斜軸&逆勾配踏面を用いた独立回転車輪台車
K-03_ビックデータ活用による鉄道車両の異常検出
K-04_鉄道車両の脱線予兆検出
K-05_フランジトップ走行を考慮した併用軌道分岐器の分岐通過シミュレーションに関する研究
K-06_車輪・レール間の接触幾何
K-07_車載用フライホイールのジャイロ機能に関する研究
K-08_車輪・レール間の摩擦制御に関する研究1
K-09_東京大学生産技術研究所 千葉試験線
K-10_鉄道車両の走行メカニズム体験台車に関する研究
K-11_鉄道試験線への期待
K-12_鉄道車両の異常検知に関する研究
K-13_鉄道_千葉試験線を活用した研究活動
K-14_駆動制御による独立回転台車の曲線通過性能向上
K-15_どこでも柵
K-16_省エネ型短距離公共交通システム_エコライド
L.準静電界
L-01_準静電界概要
L-02_準静電界の自動車タイヤへの応用
L-03_空間電位変動を利用した歩行検知
X.アーカイブ
B-04_ビークルのマルチボディダイナミクス解析
B-05_セルフパワード・アクティブサスペンション
B-06_先進モビリティ研究のための設備構築
東京大学 生産技術研究所 附属 千葉実験所 機能移転記念式典 公開資料